Deel 1 Deel 2 Deel 3 Deel 4 Deel 5 Deel 6 Naar Deel 7 Naar Deel 8 Naar Deel 9
Hierbij een update van het werk aan de heliostaat. Het duurde even voor de onderdelen arriveerden, en nog steeds wachten we op een andere motor controller card. Een onderdeel moet echter nog geregeld worden..
RTC, Real Time Clock
Het hard van de tracker wordt een zn. Real Time Clock. Wil je weten waar de zon staat dan hoef je alleen te weten hoe laat het is (zomertijd e.d. in acht genomen) daar zijn klokken immers voor. Er is een absolute tijdsindicatie nodig in digitale vorm. De chip DS1307 biedt die mogelijkheid. Het is een onafhankelijke klok die met een eigen kristal de tijd bijhoudt. Andere chips kunnen via het I2C protocol vragen hoe laat het is. De Picaxe chips die we gebruiken kunnen zelf ook seconden tellen, maar dit is minder precies. Wanneer de chips iets anders moeten doen kan het seconden tellen in het gedrang raken.
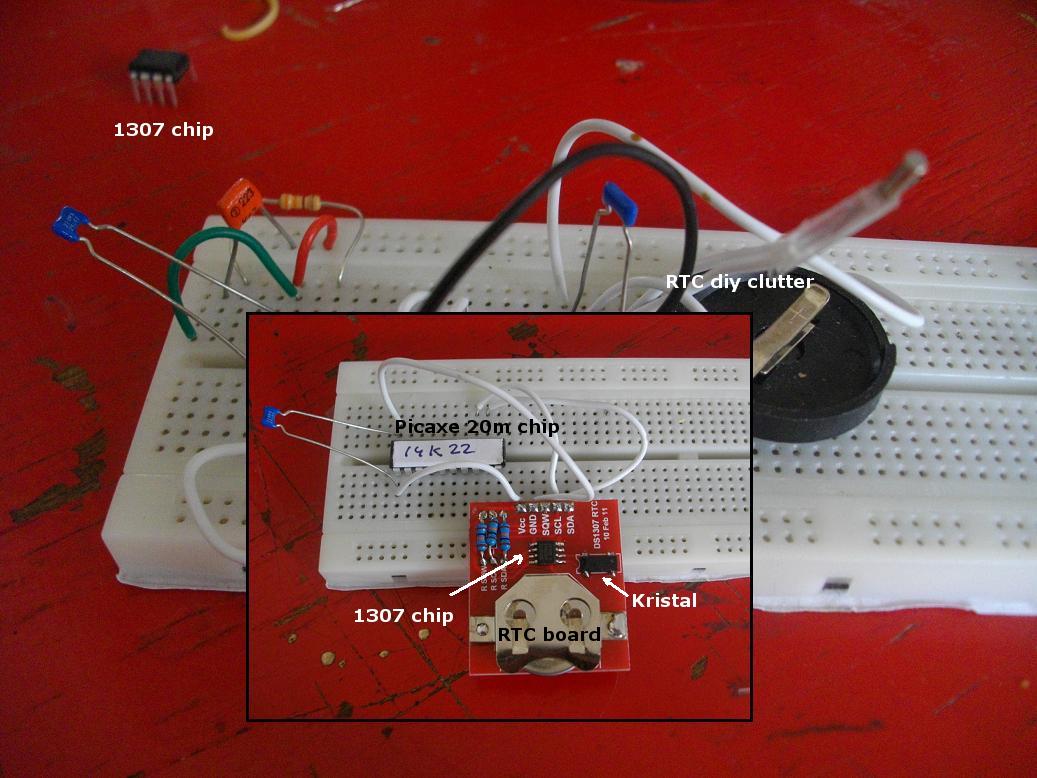
Hierboven ziet u een compositie van twee foto’s een met de oude DIY RTC op basis van de DS 1307. In het kader een RTC ‘shield’ die we op internet bestelde. Het shield maakt de opzet minder rommelig, en komt ook van pas in combinatie met het motor board dat we besteld hebben. Daar zijn maar een paar verbindingen nodig om het geheel in elkaar te zetten. De klok werkte direct.
Motor controller board
De motor van de tracker moet sterk genoeg zijn om de boel aan te drijven. Dit betekent het schakelen van een motor van 12, 24, of meet volt. Hiervoor heeft Velleman een product, de ‘Quad traic switch card’, bedoelt voor het aan en uitschakelen van 220 volt wisselspanning. Deze hebben we gebouwd om te kijken of dit een goede combi is. Het is een goed board dat de hoogspanning (220) helft van de laagspannings helft scheidt via een optische isolator. Dit is een schakelaar die werkt op basis van licht van een LED in de chip (TIL111). Als er stroom op de TIL111 interne LED wordt gezet schijnt dit op een fototransistor in het hoogspannings circuit, die daardoor dit circuit kan aansturen. Er is geen verbinding tussen de twee circuits.
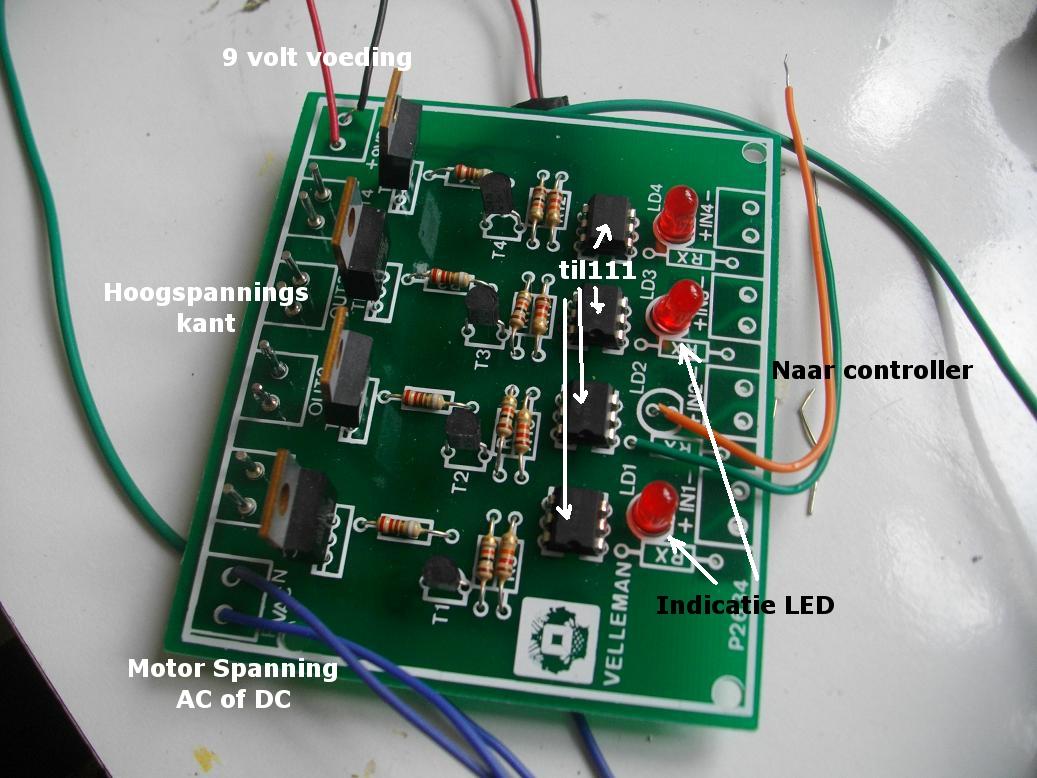
Het bestelde board heeft deze isolatie niet, en het is de vraag of dit nog nodig wordt, dat hangt af van de gebruikte motor. Om de TIL111 LED te laten branden is het signaal van de Picaxe nodig. Daarbij moet echter rekening worden gehouden met de maximale stroom die getrokken kan worden. De Picaxe chips kunnen een LED aansturen als de stroom wordt beperkt. Gebeurt dat niet dan branden ze intern door, net als een zekering bij kortsluiting. De stroom is weer afhankelijk van de belasting, en het Velleman board heeft al een LED die 20 mA slurpt en plek voor een weerstand. De LED is overkill, dus voor de test hebben we die even verwijderd. Nu is alleen nog een berekning nodig om te weten hoe we de Picaxe niet te veel belasten maar de TIL111 wel goed aansturen. Hierbij kunnen echter handig gebruik maken van het feit dat er een LED in de TIL111 chip zit, dus gewoon net doen alsof het een LED is en een weerstand van 470 Ohm voorschakelen.
We komen misschien nog voor verassingen te staan aan de hoogspannings kant. Motoren die aan en uitgeschekeld worden wekken electriciteits pulsen op, daar moet rekening mee worden gehouden, dus diodes etc. voorschakelen. Het is met bovenstaand borde echter de vraag hoe dit moet. De motoren draaien overdag een kant op, en dan ‘s avonds de ander kant. Een van de oplossingen kan zijn om een relais te gebruiken voor het dagelijks tijdelijk ompolen van de motoren. Dat kan wat verbruik betref goedkoper uitvallen. Dat zou betekenen dat de hoogspanning op dit board via een relais loopt (en dan wel gelijkspanning moet zijn). Het relais bepaalt de polariteit, die normaal zo is dat de motoren de panelen met de zon mee bewegen.
Met dit board zijn vier motoren aan te sturen, en elke motor kan een aantal assen tegelijk aandrijven. Wanneer het sensor deel zo is opgezet dat het niet uitmaakt waar de sensor zich bevind (dus storings vrij en niet gevoelig voor afstand) dan kunnen met deze opzet dus vier as systemen tegelijk worden afgesteld.
Simplele software structuur
Begin dag?
a. Ja : Positie (1-4) voor tijdstip bereikt?
Ja: Stop motor (1-4)
Nee : Motor aan (1-4)
Einde dag?
Ja : Draai terug, wacht op begin dag
Nee : Terug naar a.
b. Nee : Wacht en check tijd elke 5 minuten
c. Windsensor getriggered?
Ja : Naar stow positie (Minste wind blokkade)
Nee : Geen actie
d. Hagel stand getriggered? (of sneeuw verwijderen)
Ja : Naar uiterste startpositie (zijkanten naar boven)
Nee : Geen actie
Positie Sensoren
Al eerder is gesproken over de positie sensor. Deze is zeer belangrijk. Er zijn verschillende oplossingen, dws, een draaiweerstand (zoals in een servo motor), een optisch encoder wiel (wat kostbaar), en een magnetische sensor. De derde optie, de magnetische sensor, is de meest duurzame op het moment. Het enige nadeel is dat hiervoor de digitale uitlezing nog niet werkt, en dat de sensor relatief duur is. We gaan initeel met een draaiweerstand werken, waarbij we een uitdaging hebben bij de uitlezing van de analoge waarde, aangezien A/D conversie veel storing kent. Dit kan echter met middeling van veel waarden verholpen worden. As de hoek preciesie voldoende is kan dit goed werken en zijn weinig extra onderdelen nodig. Hieronder het calibratie bord voor de draaiweerstand die gebruikt wordt.
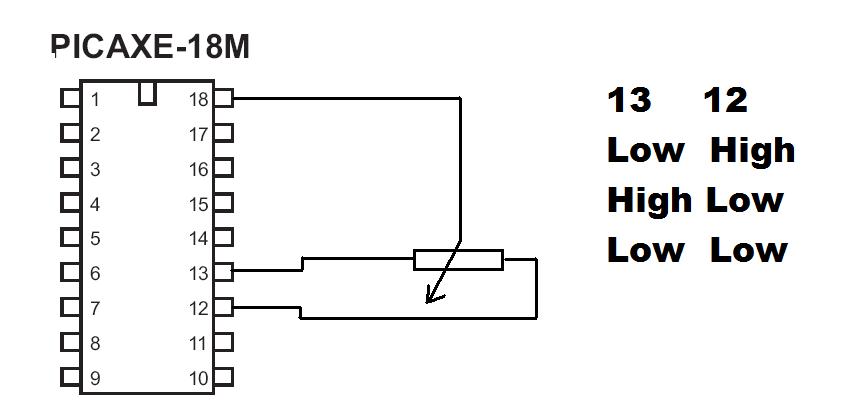
Door de staat van pin 12 en 13 te wijzigen kan de weerstand worden omgepoold en aan en uitgezet. Dit maakt betere metingen mogelijk en bespaart energie
De waarden aan de rand laten zien wat de a/d omzetter van de picaxe chip aangeeft. Hierbij zijn de waarden over 200 metingen gemiddeld. In ons geval hebben we de weerstand aangebracht tussen twee uitgangen van de chip waarvan de een hoog en de ander laag werd gezet. Dit maakt het mogelijk om energie te besparen als er geen meting nodig is.
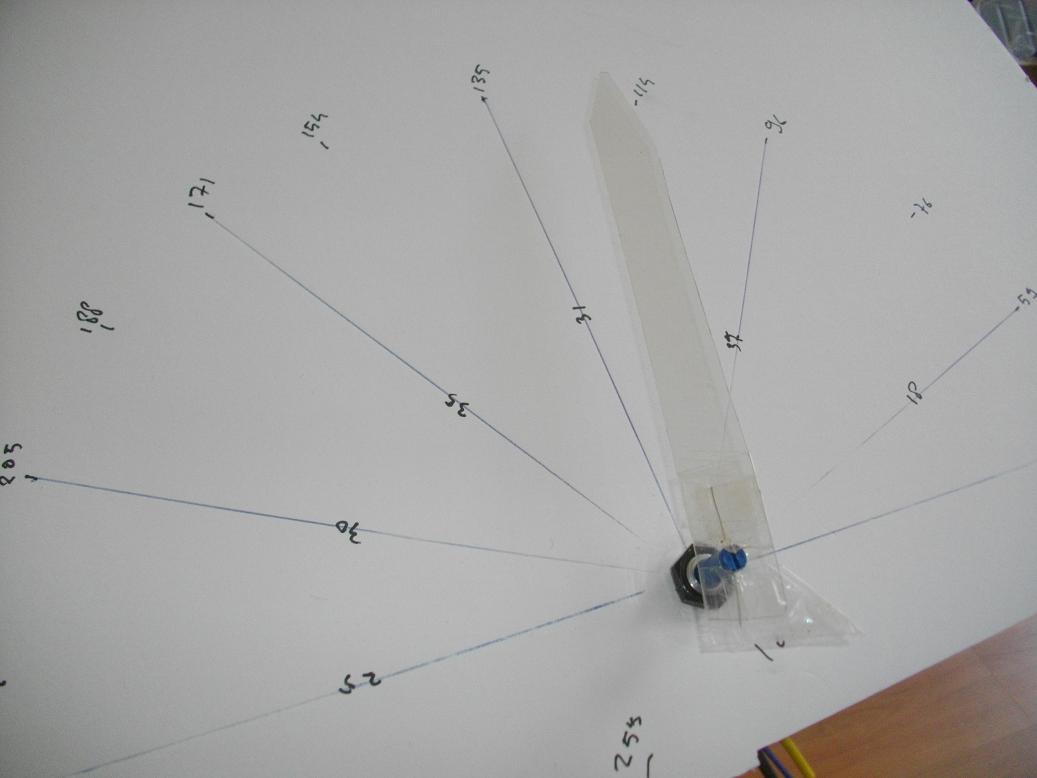
Een licht draaiende draaibare weerstand in de calibrateplaat
Uit de analyse blijkt dat de hoek en waarde van de weerstand redelijk goed opgaan, maar een drift vertonen waarbij lage stappen een grotere hoek vertegenwoordigen dan hogere. Er kan voor de preciesie gekozen worden om de polarietie over de weerstand voor hogere waarden om te draaien (door de uitgangen van de chip ongekeerd in te stellen).
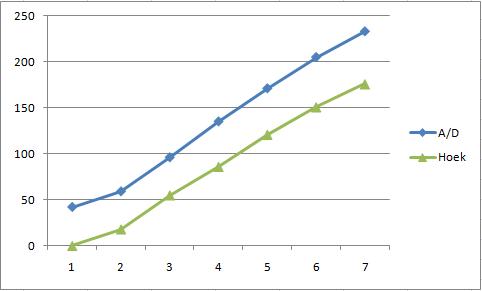
| A/D Waarde | Hoek tov Waarde 42 in Graden | Graad per Waardestap |
| 42 | 0 | |
| 59 | 18 | 1,058824 |
| 96 | 55 | 1,018519 |
| 135 | 86 | 0,924731 |
| 171 | 121 | 0,937984 |
| 205 | 151 | 0,92638 |
| 233 | 176 | 0,921466 |
De waarden zijn wel betrouwbaar, dus wanneer de pijl terug wordt geplaatst waar een A/D waarde is gemeten dan is die waarde repliceerbaar. We kunnen er voor kiezen om ook de eind installatie simpelweg te calibreren. Dan is het niet langer nodig om de relatie van graden en waarden te kennen, anders dan dat deze bij installatie moet worden vastgesteld.
Conclusie: 2 graden precies is haalbaar
Het is belangrijk is voor het gebruik van A/D conversie om een pauze in te lassen voordat de meting gedaan wordt. Er zijn zeer veel storende factoren in en om de chip die de tijd nodig hebben om weg te sterven. Alle voorzorgsmaatregelen om storingen te voorkomen, zoals afschermen van de draden en aanbrengen van ontstorings condensatoren lonen. Speciaal ontwerp van de printplaat of het zeer dicht bij het meetpunt aanbrengen van de A/D conversie (zijn we van plan) vergroot de betrouwbaarheid.
Alle elementen voor de installatie zijn nu compleet, het wordt mooier met de bestelde stuur printplaat. De gebruikte chip heeft nog een andere, innovatieve optie voor het meten van de positie die we misschien gaan combineren met de weerstand meting, bv. ter calibratie.