Deel 1 Deel 2 Deel 3 Deel 4 Deel 5 Deel 6
Even een recapitulatie van de geplande aanpak, Great Cow Basic blijkt niet praktisch genoeg, picaxe en C blijken daarentegen goed te werken :

Paneel op heliostaat, rechts de servo, midden links onder de sensor (servo potmeter) de uiterste posities zijn 120 en 190, voor een hoek van 90 graden, dus elke stap is ongeveer 0.7 graad.
Picaxe aanpak
Hierbij willen we een Picaxe 18m chip gebruiken in combinatie met het 18hp board en een 1307 rtc (real time clock). We moeten misschien iets met het 18hp board doen om een H-brug te implementeren. Dit board staat het gebruik van een grote motor toe. er kan ook van een kleinere motor controller chip gebruik worden geemaakt zoals hieronder te zien is. Daarover later meer.
De 18m chip wordt geprogrammeerd om aan de hand van de rtc de motor te bedienen, daarbij input ontvangend van een sensor op de as van de heliostaat. De 18m heeft 10 bits a/d conversie wat betekent dat 1024 stappen gemeten kunnen worden, meer dan de voor servo’s gebruikelijke 255. Als er 500 stappen accuraat gemeten zouden kunnen worden betekent dat een precisie van een halve graad over een hoek van 270 graden.
De rtc wordt op een apart printplaatje aangebracht. Deze zijn via Ebay in verschillende vormen te krijgen. Het gehele controle gedeelte zal dus (uiteindelijk) uit een voeding, bediening en i/o, een rtc module en de schakel printplaat (18hp) bestaan.
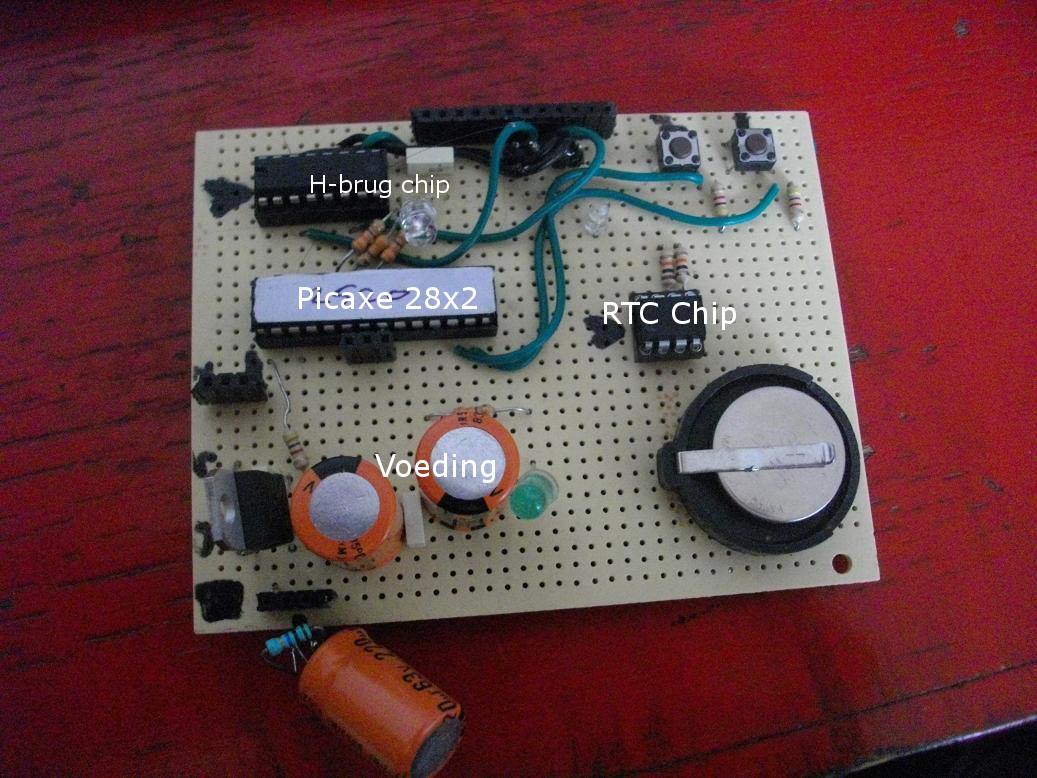
Voorbeeld van een vergelijkbaar ontwerp mbv een picaxe 28×2. Door gebruik te maken van de standaard kits is de samenstelling eenvoudiger.
Pic 16f88 aanpak
Met de 16f88 maken we ook gebruik van de bovenstaande onderdelen, maar daarbij willen we in plaats van A/D conversie een externe chip gebruiken die de hoek van de as zeer nauwkeurig doorgeeft. Deze heeft 10 bits dus 1024 stappen, en mogelijk ook 12 bits dus 8096 stappen per 360 graden precisie oftewel 0,04 graden per stap. Dit is buitengewoon precies en volstrekt overbodig voor een PV heliostaat. Voor een spiegel heliostaat is het echter belangrijk dat de positie van de spiegel exact goed is, en bouwend op deze controller kan een zeer grote groep spiegels (over het oppervlak van een voetbalveld) worden aangestuurd. Deze aanpak is iets complexer.
Display
Een display verbinding is voor beide werkwijze mogelijk. Dit kan op verschillende manieren, initieel met indicatie leds en de seriele verbinding, later via een lcd of led display of zelfs een scherm. Primair werken we met indicatie lampjes.