![]()
Even terug naar het ontwerp. Er zijn verschillende manieren om een paneel naar de zon te draaien. Ten eerste kan men een sensor gebruiken om te kijken waar de zon vandaan komt. Ten tweede kan men een klok gebruiken om aan de hand van het moment van de dag de goede richting in te stellen. Het nadeel van de eerste manier is dat het niet altijd goed gaat, bv. ivm bewolkinng. Het nadeel van de tweede manier is dat de klok verkeerd kan lopen of het programma om de klok informatie te verwerken niet goed werkt. Toch is de tweede manier waarschijnlijk de beste voor Nederland.
Wat we dus willen is een manier om een motor zo aan te sturen dat op een of andere manier een paneel in een bepaalde stand komt. Doen we dit met een motor op de as dan hebben we een grote vertraging nodig. In principe zou een electrische 24 uurs klok dit kunnen doen, maar praktisch is dit niet. een hack zo een electrische klok zijn die een grotere motor aanstuurt mbv dip switches, maar dat is ook niet erg robuust. Een andere manier om een paneel te bewegen is door er een arm aan te maken die aan een loper verbonden is die over een schroefdraad loopt. De motor drijft het schoefdraad aan en beweegt zo de arm. De arm scharnierend verbonden met de loper zodat het geheel zichzelf optimaal kan positioneren en toch het paneel bewegen.

Andere alternatieven zijn het gebruik van een verbindend kabel voor meerdere heliostaten of pneumatische of hydraulische oplossingen. Wat alle manieren gemeen hebben is dat men moet weten hoe het paneel georienteerd is, dwz het effect van wat de motor doet of gedaan heeft. Zeker als er schroefdraad wordt gebruikt is de relatie tussen de hoek die het paneel maakt en de keren dat de motor gedraaid heeft niet vanzelfsprekend (lineair). In ons geval, waar we niet kijken naar het effect van de richting die het paneel opwijst (wat wel het geval zou zijn bij het gebruik van een licht sensor) hebben we geen idee zonder iets te verzinnen.

Dit soort motoren zijn nog redelijk duur (129 USD)
De oplossing is eenvoudig, we hebben een positie meter op de as nodig. Dit kan een draaibare weerstand zijn of een wieltje waarop positie codes staan (zoals deze) de kosten en robuustheid spelen een rol in de afweging. Een andere mogelijkheid is een draaibare weerstand, ofwel potentiomenter. Als we die gebruiken moeten we de weerstant meten om de tichting van het paneel te bepalen. Als we die manier gebruiken verandert de heliostaat in een soort grote servo, en we zouden zelfs een servo kunnen slopen om aan het stuur mechanisme te komen (geen gek idee). Het nadeel van veel servo’s is dat deze maar 255 posities kennen, dus de hoek die kan worden ingesteld is beperkt. De meeste hebben een draaihoek van 180 graden, dus ongeveer een graad precisie, eigenlijk niet slecht. Een laatste interessante manier is om een ander soort positie meter te gebruiken, nl een magnetische sensor met digitale output zoals de AS5040 used with the pic mcu here.
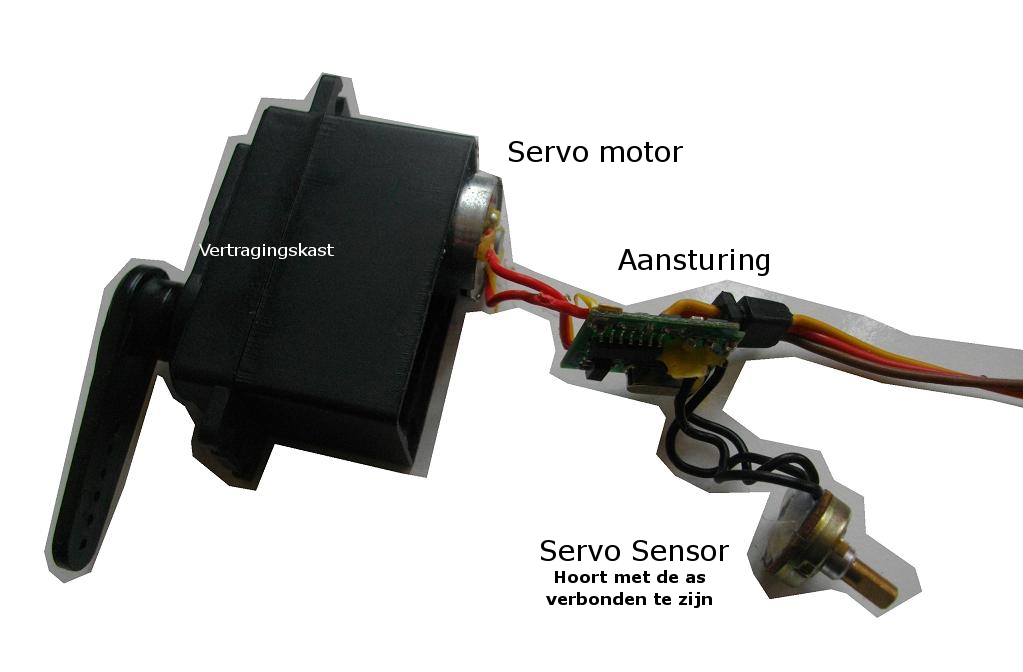
Een servo heeft alle elementen om een heliostaat aan te sturen, en deze heeft zelfs een pic processor. Alleen de uitvoering moet robuuster. De servo kan/moet met een pic worden aangestuurd (het positie signaal). Dit is een goed experiment om snel een werkend prototype te hebben bv. ter demonstratie. Nog interessanter is het om de servo pic zelf te hacken zodat het via een seriele verbinding positie data kan accepteren. Dit maakt de sturing iets indirecter, maar dat hoeft geen probleem te zijn.
Al deze mogelijkheden maken het moeilijk een goede processor te kiezen, maar omdat er kits zijn voor motor aansturing voor 18 pins pic micro controllers en we die kant al op aan het kijken waren zullen we de pic 16f88 gebruiken. Deze heeft analoge ingangen, kan servo’s aansturen en heeft een spaarstand (naast nog veel meer mogelijkheden). Overigens zit men met de keuze van chips nergens aan vast, het eindddoel moet misschien een usb compatible chip zijn ten behoeve van eenvoudige communicatie. We gaan proberen in eerste instantie dan wel een potmeter dan wel een magentische sensor te gebruiken en een klok.